| |
Graspbot+Programmierung
(182/209)
|
lanpacher Johannes
Donnerstag, 10. Juli 2008
|
|
Heute versuchten wir den Roboter so zu programierten, dass er die einzelnen Gesteinsproben einsammeilt und sie vor den Greifarm legt. 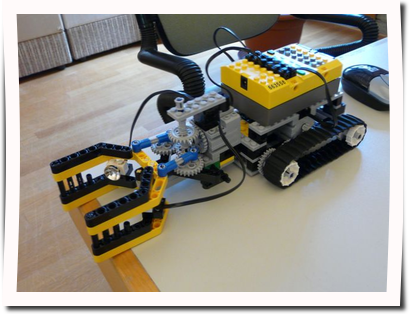 Doch das war sehr kompliziert, denn die Raupen des Graspbots bewegen sich je nach Untergrund und Temperatur minimal aber eben entscheident unterschiedlich. Dieses Problem lösten wir, indem wir Lichtsensoren anbauten und sie so programmierten, dass der Grapbot an einer schwarzen Linie fahren kann.    
|













))
))
))
))



)){kind=link}
)){kind=link}
Kategorie:
Marsmission