Nössing Philipp
Donnerstag, 10. Juli 2008
|
|
Heute haben wir unseren Greifbot fertig gestellt und ihn programmiert. Nachher fing ich an mit Moritz einen Sortrierbot zu bauen. Wir haben es leider nicht geschaft ihn bis zum Abend fertig zustellen.
|

Kompatscher Lukas
Dienstag, 8. Juli 2008
Zuletzt geändert:
Donnerstag, 10. Juli 2008
|
|
Heute setzten wir uns das erste mal zusammen, um unsere "Marsmission" zu planen. Vorschläge wurden gemacht, Ideen gesammelt und die Arbeit aufgeteilt. Wir (Markus und Lukas) nahmen den "Kartenersteller" in Auftrag. Wir unterschätzten die Herausforderung, kamen aber doch zu einem befriedigenden Ergebnis. Unser selbst entworfener Kartenzeichner besteht aus zwei verschiedenen Robotern: 1. Scanbot 2. Stampbot Heute machten wir den Scanbot, der mit Hife des Lichtsensors dunkle von hellen Flächen unterscheiden kann. Er ist so gut wie fertig. Morgen kommt der Stampbot an die Reihe. Dieser soll mit den Informationen des Scanbots eine Karte zeichnen. 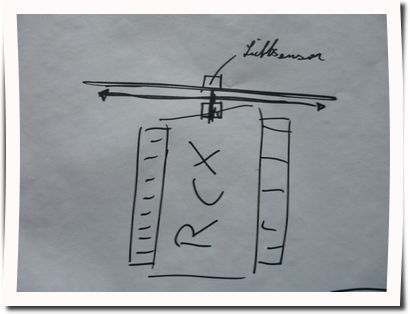 Zeichnung  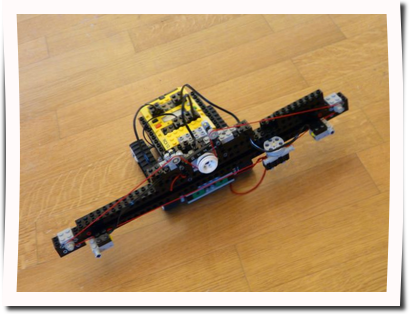
Scanbot Lukas und Markus
|
Ansaloni Julian
Dienstag, 8. Juli 2008
Zuletzt geändert:
Mittwoch, 9. Juli 2008
|
|
Heute fingen wir mit unsererem eigentlichen Projekt der Marsmission an. Unsere Gruppe baute einen Transporter namens Transbot. Er besteht aus einem Roverbot und aus der von uns verlängerten Ladefläche. 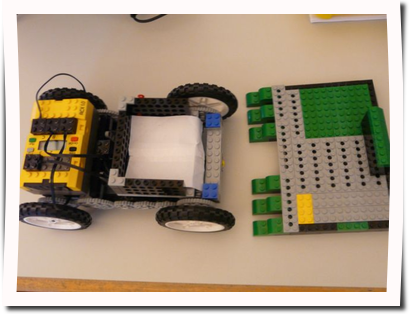
Anfänglich bereitete die Ladefläche uns Probleme, aber Freunde halfen bei der Behebung. Später halfen wir bei verschiedenen Sachen mit. Lukas, Tobias, Julian
|
oberrauch moritz
Dienstag, 8. Juli 2008
|
|
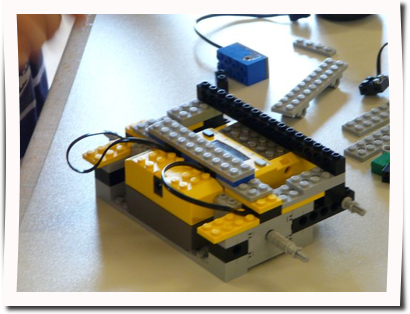
Auch heute wieder haben wir an unseren Robotern für die Marsmission gebastelt! Trotz mehreren  Herausforderungen sind wir mit unserem Projekt, der Sortiermaschine, einen großen Schritt weiter gekommen. Förderband und Sensoren sind so gut wie fertig gestellt, es fehlt nur noch an dem Sortiermechanismus und der Programmierung!!  
|
lanpacher Johannes
Dienstag, 8. Juli 2008
|
|
Philipp und ich haben den Auftrag erhalten, Steinproben zu sammmeln. Wir entwickelten zuerst ein Raupenfahrzeug mit einem Pflug(Graspbot). Als wir einen Kran mit Greiffunktion bauten hatten wir erste Schwierigkeiten, aber wir sind zuversichtlich, dass wir das Problem morgen in den Griff bekommen.   
|
randeu tobias
Dienstag, 8. Juli 2008
|
|
Jede Gruppe bekam einen Auftrag (Roboter entwerfen, bauen und programmieren). Jeder Roboter musste bestimmte Fähigkeiten haben. Unserer misst die Temperatur und die Helligkeit (Tag/Nacht) mit Hilfe von Sensoren. Er bekam den Namen Klimabot. 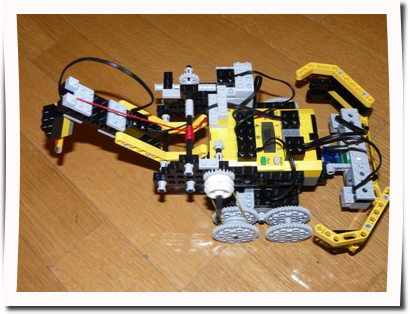
|
Ansaloni Julian
Dienstag, 8. Juli 2008
|
|
Wir haben folgenden Plan ausgearbeitet: Wenn wir wollen, dass unsere Roboter auf dem Mars genau wissen was sie zu tun haben, haben wir beschlossen alles genau zu besprechen. Unser größtes Ziel ist es die Roboter auf dem Mars kommunizieren zu lassen. Andere Aufgaben, die wir in Zweier- oder Dreiergruppen erarbeiten werden, sind: Stein- und Erdproben aufsammeln und analysieren die Marstemperatur und die Dauer eines Marstages zu messen Marskarten scannen und erstellen alle Daten müssen zum Kommunikator gesendet werden
Damit die Roboter sich auf dem Mars bewegen können haben wir uns folgendes überlegt: Raupen Vierräder Klettern Zweibeiner
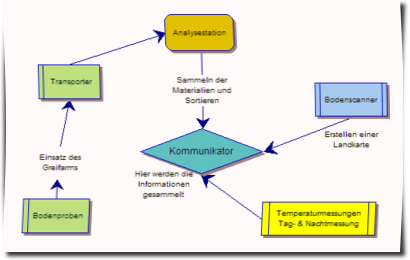
Wir werden folgende Roboter bauen Kommunikator: wertet Daten aus und sendet Funksignale zur Erde Kartobot: scannt das Gelände und zeichnet Karten Graspbot: lädt Gesteinsproben auf den Transbot Transbot: transportiert Gesteinsproben zum Kommunikator Klimabot: misst Temperaturen und die Tages- und Nachtdauer
|

Christian Laner
Dienstag, 8. Juli 2008
|
|
Seit Montag arbeiten 12 Jugendliche im Alter zwischen 11 und 13 Jahren an der Marsmission. Sie entwickeln ein Konzept für diese Mission, werden dazu die entsprechenden Robotermodelle entwickeln und bauen, die dann die von der Gruppe gemeinsam entwickelten Aufgaben lösen sollen. 
In den nächsten Tagen werden die Jugendlichen selbst täglich von ihrer Arbeit und ihren Erfahrungen berichten. Wir werden das Konzept vorstellen und würden uns über eine rege Diskussion freuen.
|
Kompatscher Lukas
Montag, 7. Juli 2008
|
|
Heute haben ich mir mit Markus zu erst einmal einen Überblick über den "Lego Mindstorms-Roboter" und die Mindstorms-Software verschaffen. Langsam fingen wir an eigene Ideen zu entwickeln, zu bauen und ein Programm dafür zu schreiben. Wir bauten einen Roboter der sich beim Bremsen überschlägt und sogar auf zwei Räder balanciert. 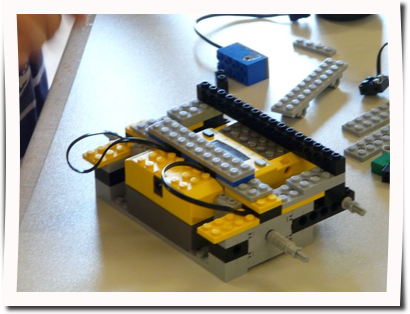
|
sellemond markus
Montag, 7. Juli 2008
Zuletzt geändert:
Dienstag, 8. Juli 2008
|
|
Anfangs bauten wir verschiedene Geräte nach Plan, dann versuchten wir einen Roboter nachzubauen, den wir in einem Film gesehen haben, das sich immer wieder überschlug. Das Gerät war sehr instabil, aber es gelang uns, es zu verstärken sodass es nicht nach jedem Überschlag zusammenbrach.
|













))
))
))
))
))




Kategorie:
Marsmission