oberrauch moritz
Donnerstag, 10. Juli 2008
|
|
Wie immer, war auch der letzte Tag mit so einigen Problememn verbunden. Trotzdem haben wir unseren Roboter (fast) fertig gemacht. 
Und wie es so schön heißt: "Wenn die Generalprobe daneben geht, wird die Aufführung grandios!!"  
|
lanpacher Johannes
Donnerstag, 10. Juli 2008
|
|
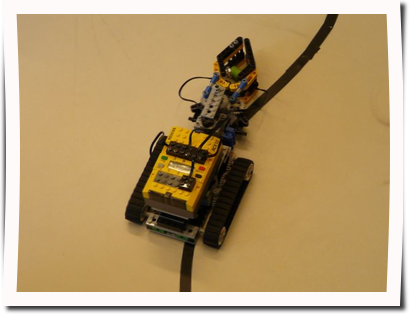
Heute versuchten wir den Roboter so zu programierten, dass er die einzelnen Gesteinsproben einsammeilt und sie vor den Greifarm legt. 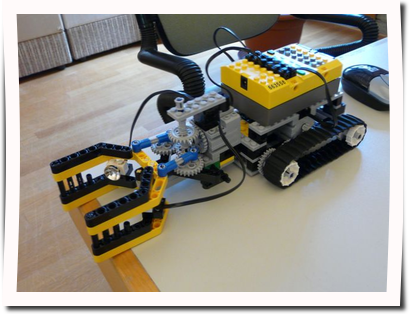 Doch das war sehr kompliziert, denn die Raupen des Graspbots bewegen sich je nach Untergrund und Temperatur minimal aber eben entscheident unterschiedlich. Dieses Problem lösten wir, indem wir Lichtsensoren anbauten und sie so programmierten, dass der Grapbot an einer schwarzen Linie fahren kann.    
|
Nössing Philipp
Donnerstag, 10. Juli 2008
|
|
Heute fingen wir an die verschiedenen Roboter, so zuprogrammieren, dass sie miteinander harmonieren. Mit anfänglichen Problemen, führten wir ihn doch noch zur Vollendung. Wir Müssen morgen mit Problemen rechnen.   
|

Kompatscher Lukas
Donnerstag, 10. Juli 2008
|
|
Da wir uns gesten so stark auf das bauen konzentrierten hatten wir keine Zeit mehr den Beitrag in den Blog zu schreiben, desshalb erst heute. Wir machten den Stampbot. Auch keine leichte Arbeit, wieder mussten wir lange herumm probieren. Wir schwafften es dann aber doch noch vor der Olympiade die auf dem Programm stand. Man messte sich in Federpusten, Würfeln, usw. 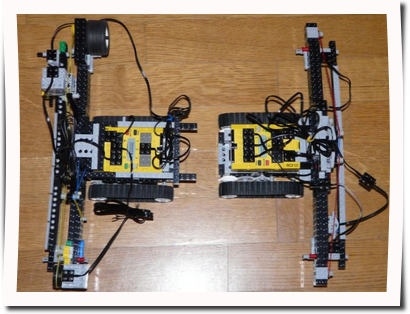
|
lukas alber
Donnerstag, 10. Juli 2008
|
|
Heute habe ich und meine Kollegen unseren Transbot fertig gestellt und passend programmiert. 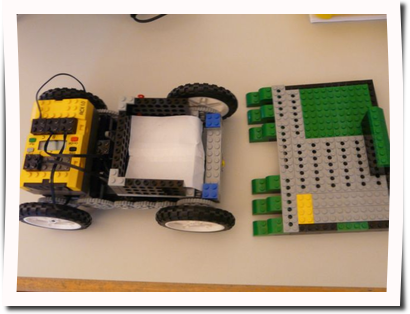 Dann baute ich eine Verkleidung aus Karton für die Kommunikatoranzeige. Dann fing ich mit Johannes an die Choreographie für unsere Roboter zu programmieren. Dann baute ich eine Verkleidung aus Karton für die Kommunikatoranzeige. Dann fing ich mit Johannes an die Choreographie für unsere Roboter zu programmieren.
Lukas Alber
|
sellemond markus
Donnerstag, 10. Juli 2008
|
|
meinen vorgestrigen blogbeitrag findet ihr bei meinem gruppenkollegen lukas kompatscher. gestern stellten wir den stampbot fertig. nun sind beide roboter mehr oder weniger fertig. heute steht aber noch ein schwerer teil unserer arbeit vor uns: die programmierung. die schwierigkeit besteht darin, beide roboter miteinander kommunizieren zu lassen. ich bin aber zuversichtlich,dass wir es schaffen und morgen bei der vorführung einen großen erfolg mit unseren robotern erzielen können. 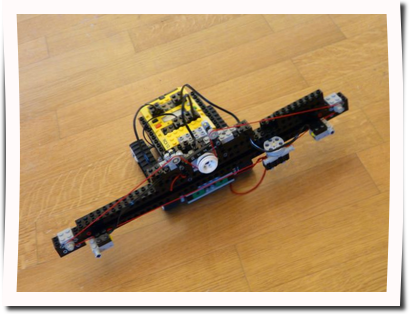
|
hannes mölgg
Donnerstag, 10. Juli 2008
|
|
Auch gestern haben wir bei unserem Laufband weitergearbeitet. Wir haben eine Zählmaschine in das Laufband eingebaut. Unser Laufband ist jetzt so gut wie fertig. Es muss nur noch mit dem Zählwerk kommunizieren. David und Hannes
|
lanpacher Johannes
Donnerstag, 10. Juli 2008
|
|
Als wir den Roboter programmieren wollten war er zu instabil, deshalb bauten wir ihn stabiler. Dies war sehr aufwändig, da wir den ganzen Graspbot wieder auseinander nehmen mussten. Dann versuchten wir noch den Roboter zu programmieren.
|
oberrauch moritz
Donnerstag, 10. Juli 2008
|
|
Auch gestern hatten wir mehrere Schwierigkeiten mit unserer Sortiermaschine. Nach einer generalrenovierung des hinteren Laufbandes, blieben "nur" noch die Sensorenkalibration, die Zählmaschine und das Problem mit der Kommunikation mit dem Transpot und der digitalen Anzeige. Trotz einiger Rückschläge und neuen Problemen, aber auch Vortschritte, starten wir morgen wieder "vollpower" in den nächsten Tag um das Projekt endlich abzuschließen.
|
hinterlechner daniel
Donnerstag, 10. Juli 2008
|
|
Gestern haben wir unseren Klimabot fertig zusammen gebaut und schon teilweise programmiert. Er kann jetzt an zwei Stationen die Temperatur und den Lichtwert messen. 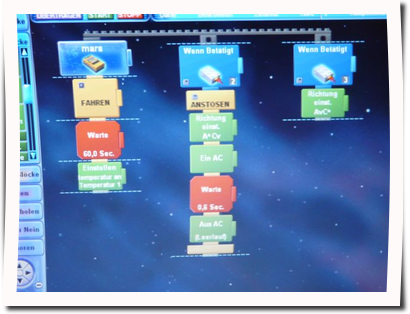
|













))
))
))
))
))
))
))
))
))



)){kind=link}
)){kind=link}
Kategorie:
Marsmission